314 moments
Algorithmic cartographies of human presence in public space
Project direction: Edouard Cabay
Coding development: Rodrigo Aguirre
Digital Fabrication: Alejandro RondĂłn
Automation protocols: Alexandre Dubor
Sound engineering: Lina Salamanca
In collaboration with IaaC
Overview
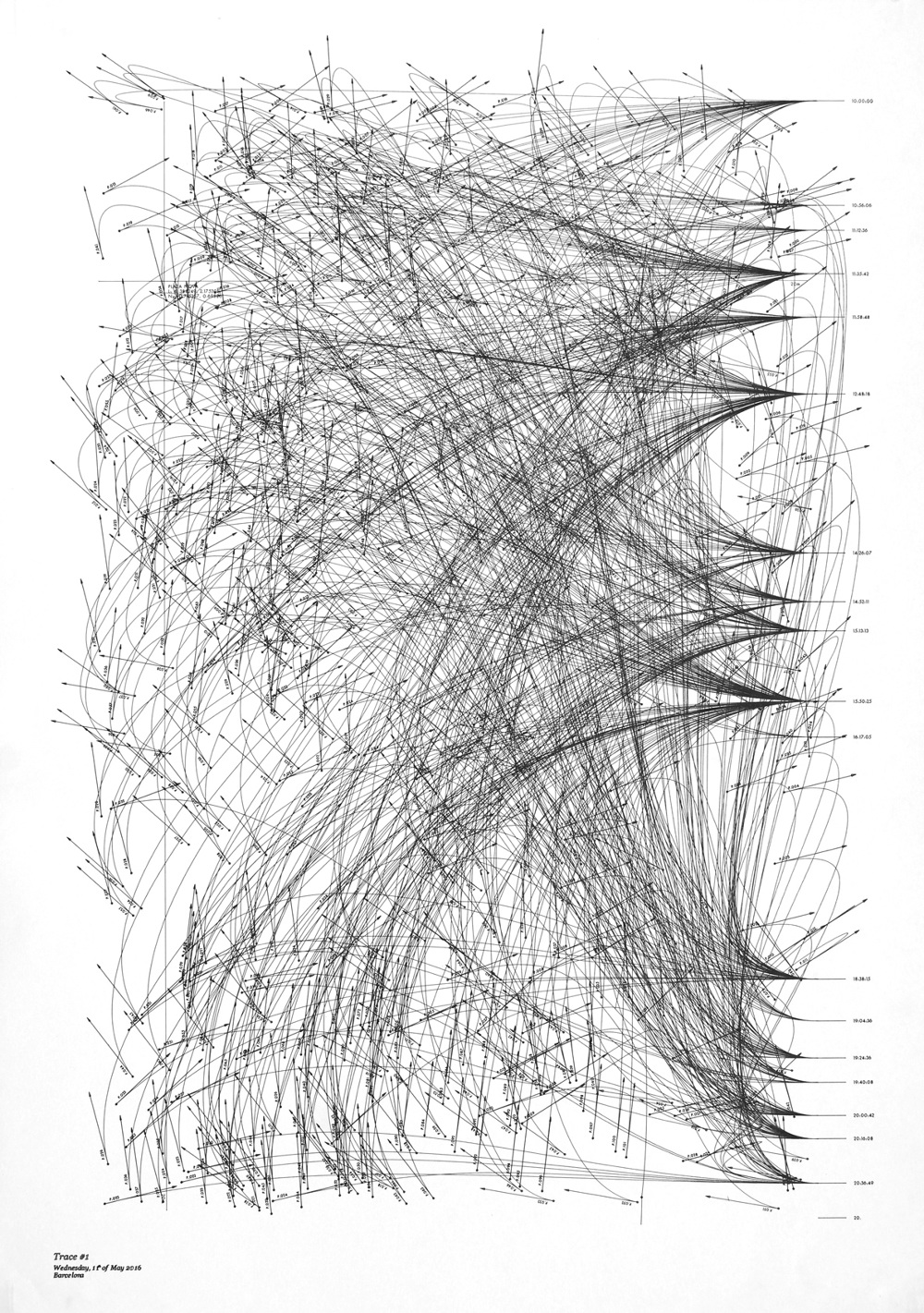
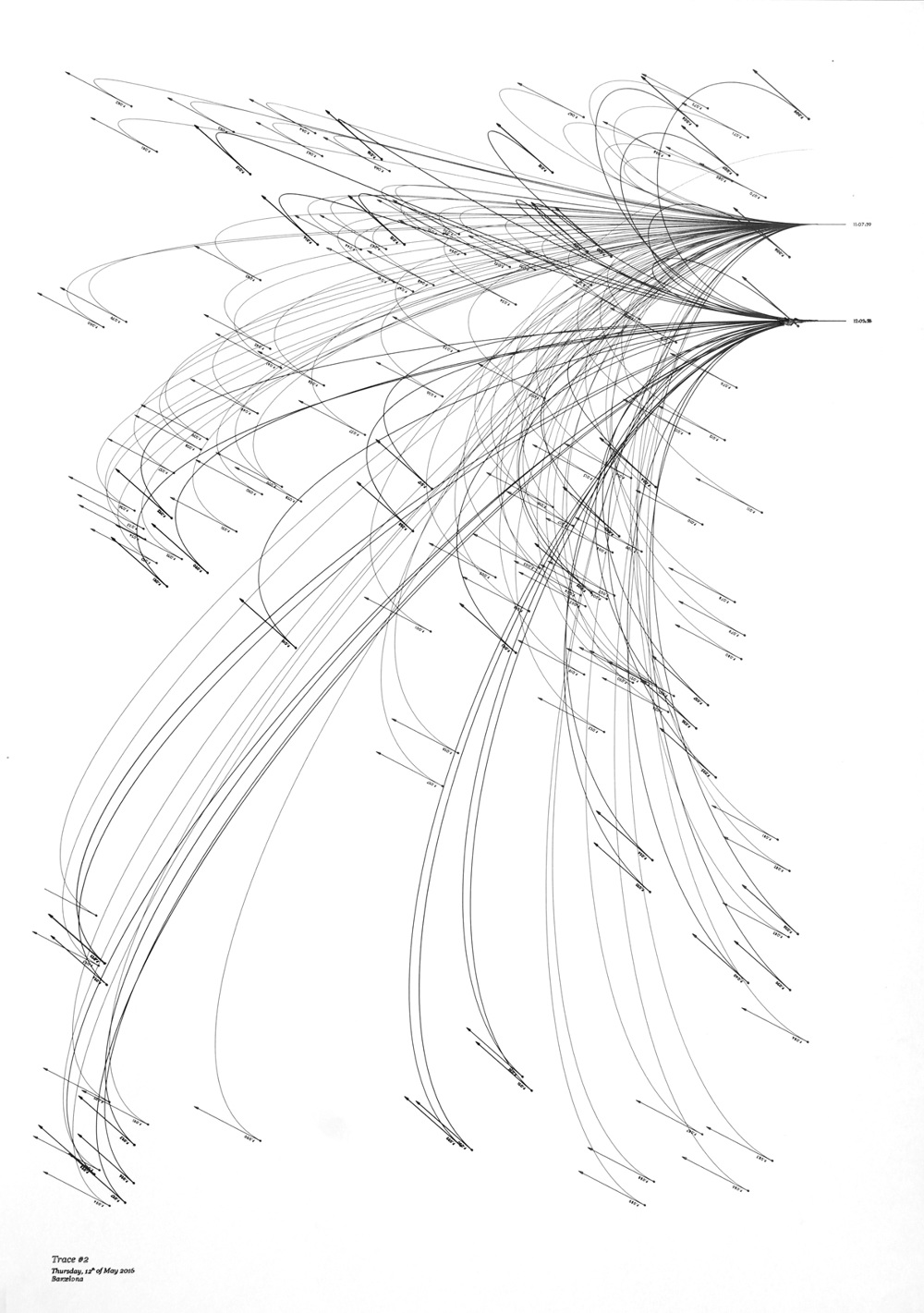
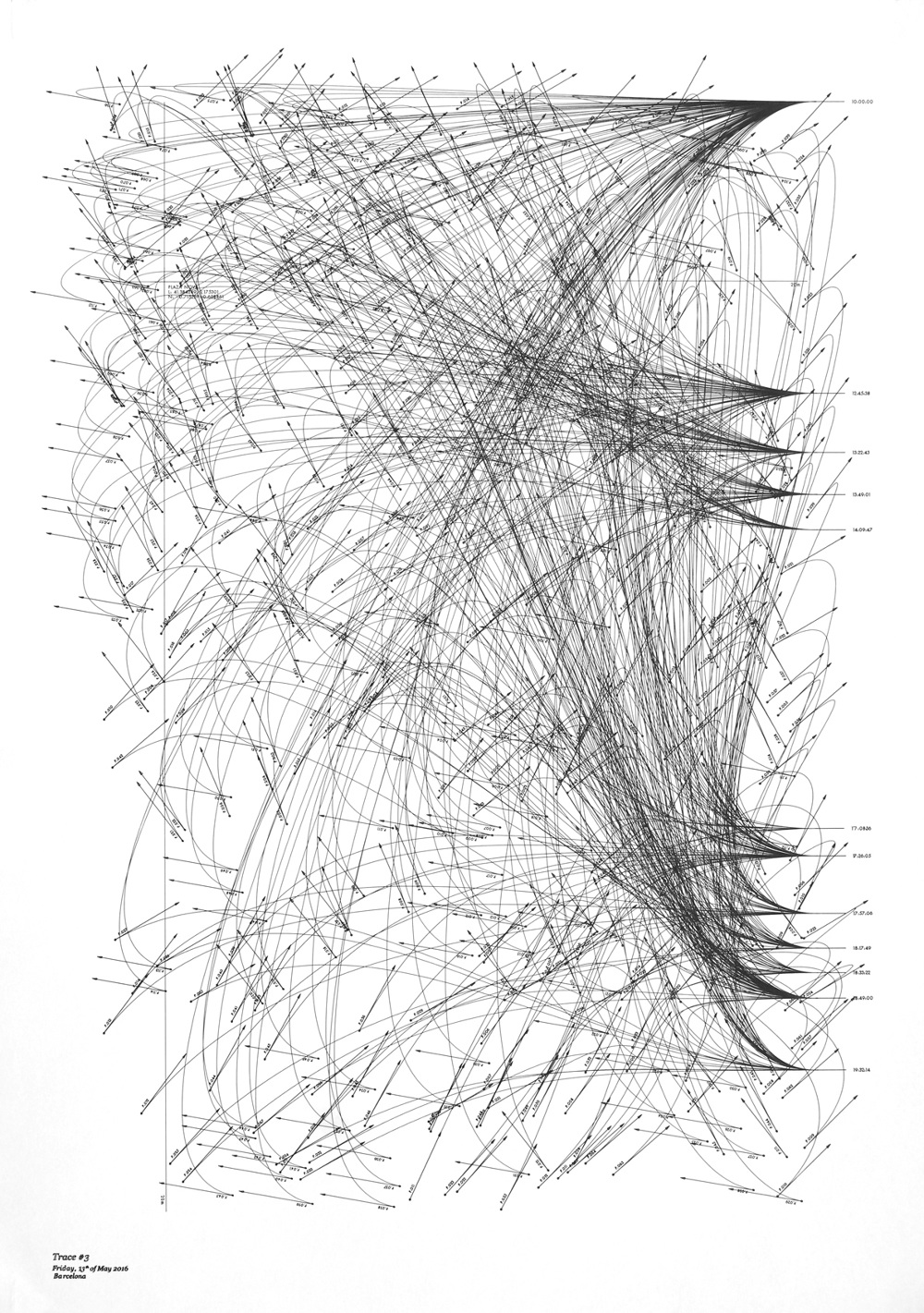
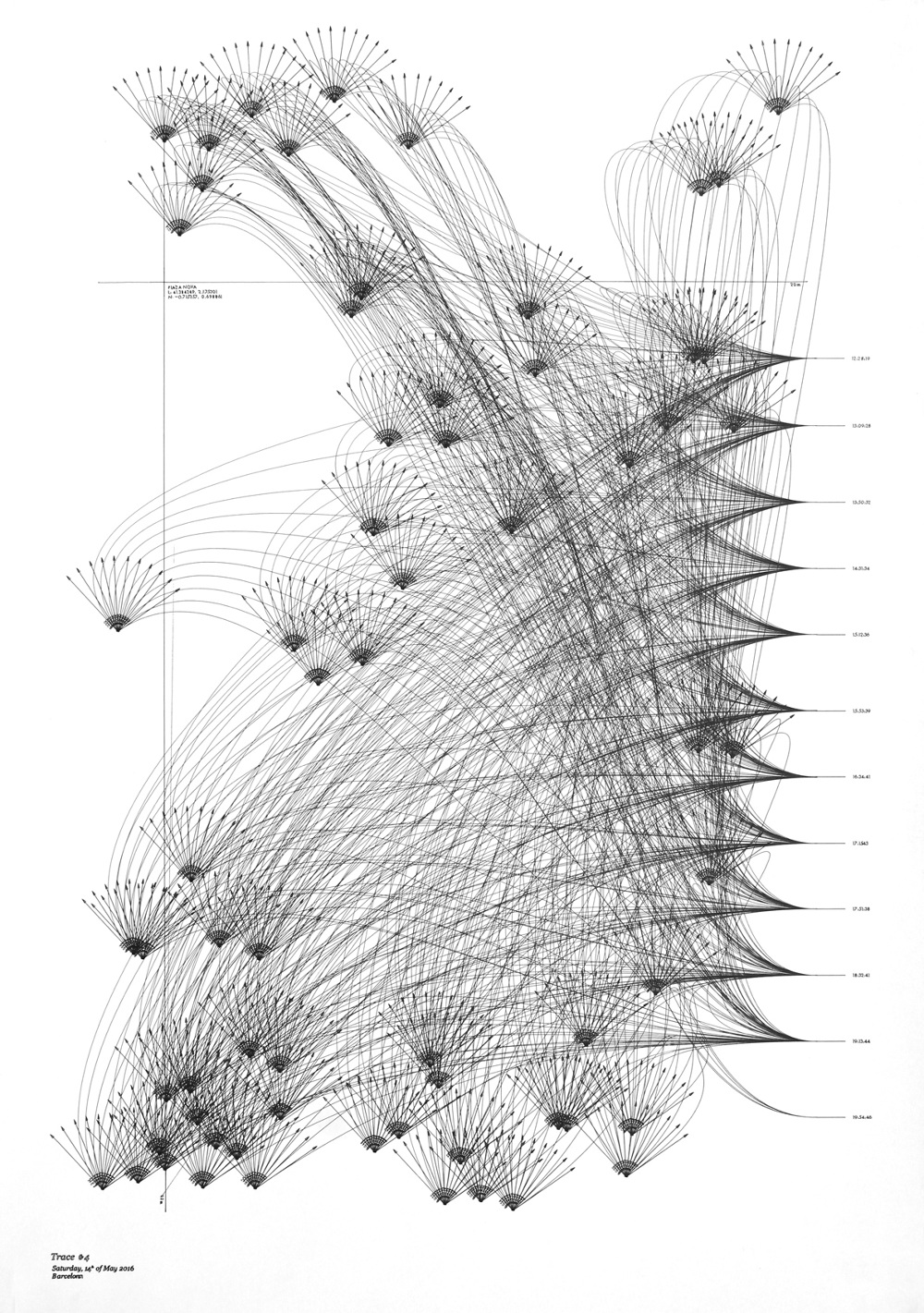
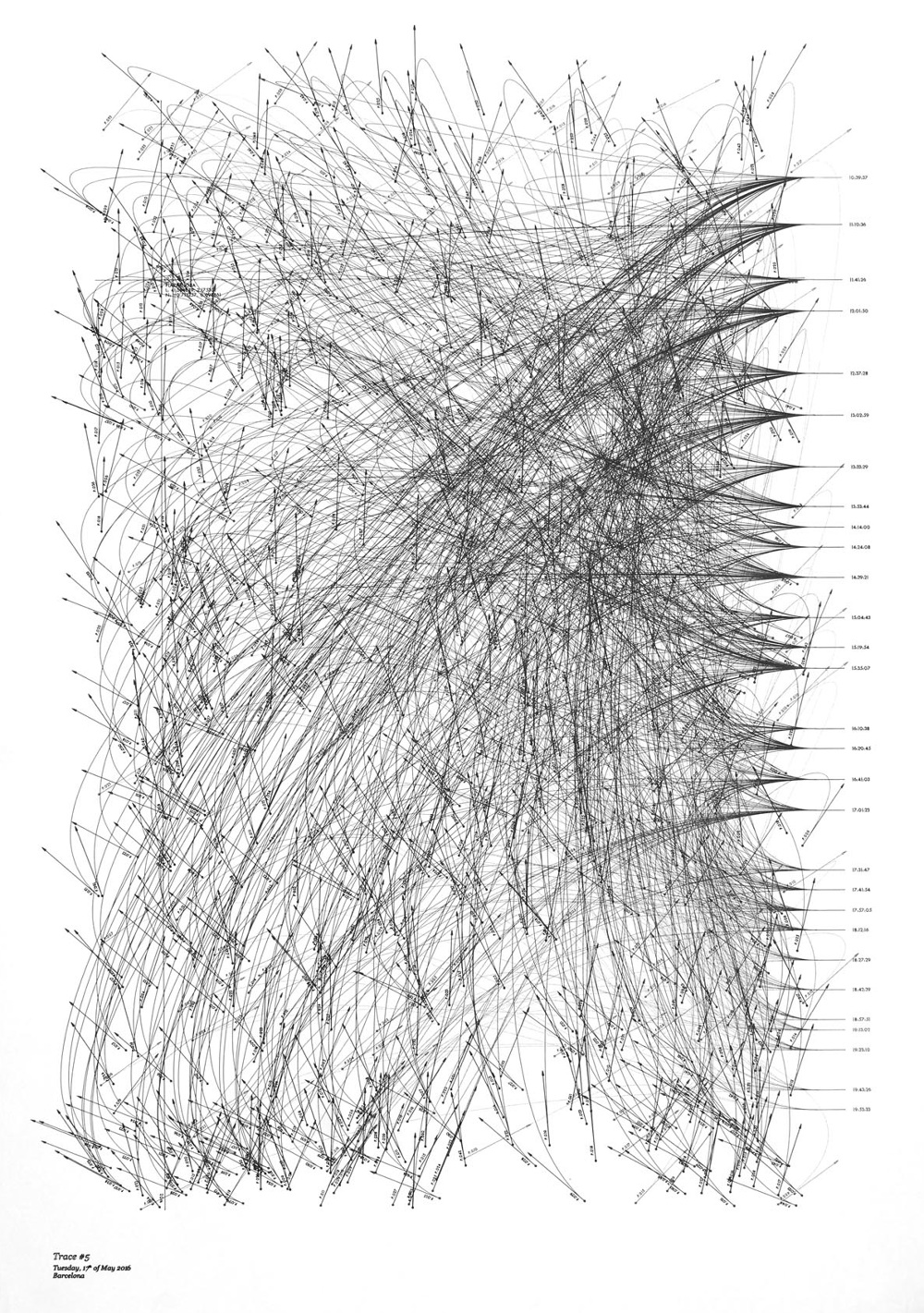
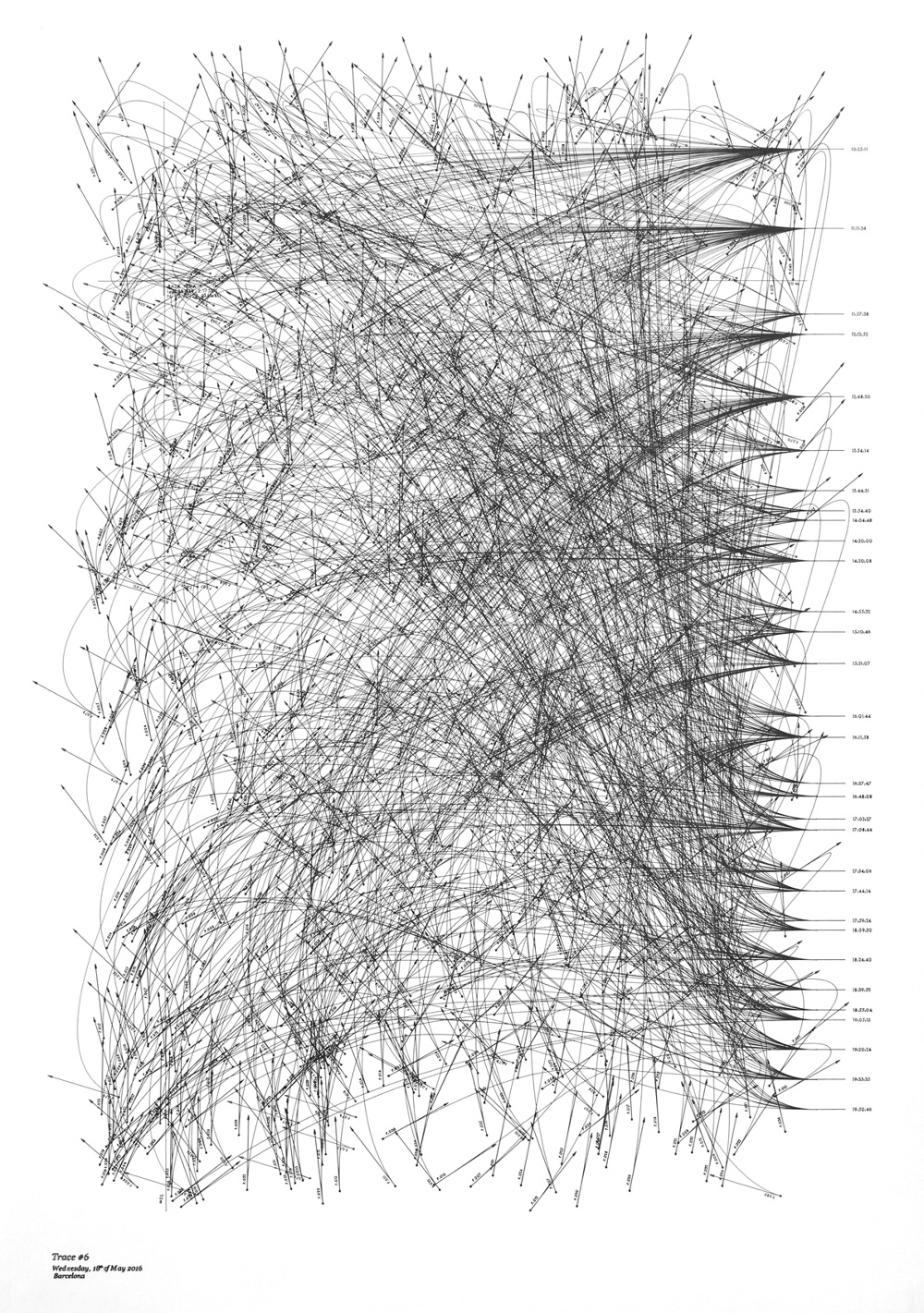
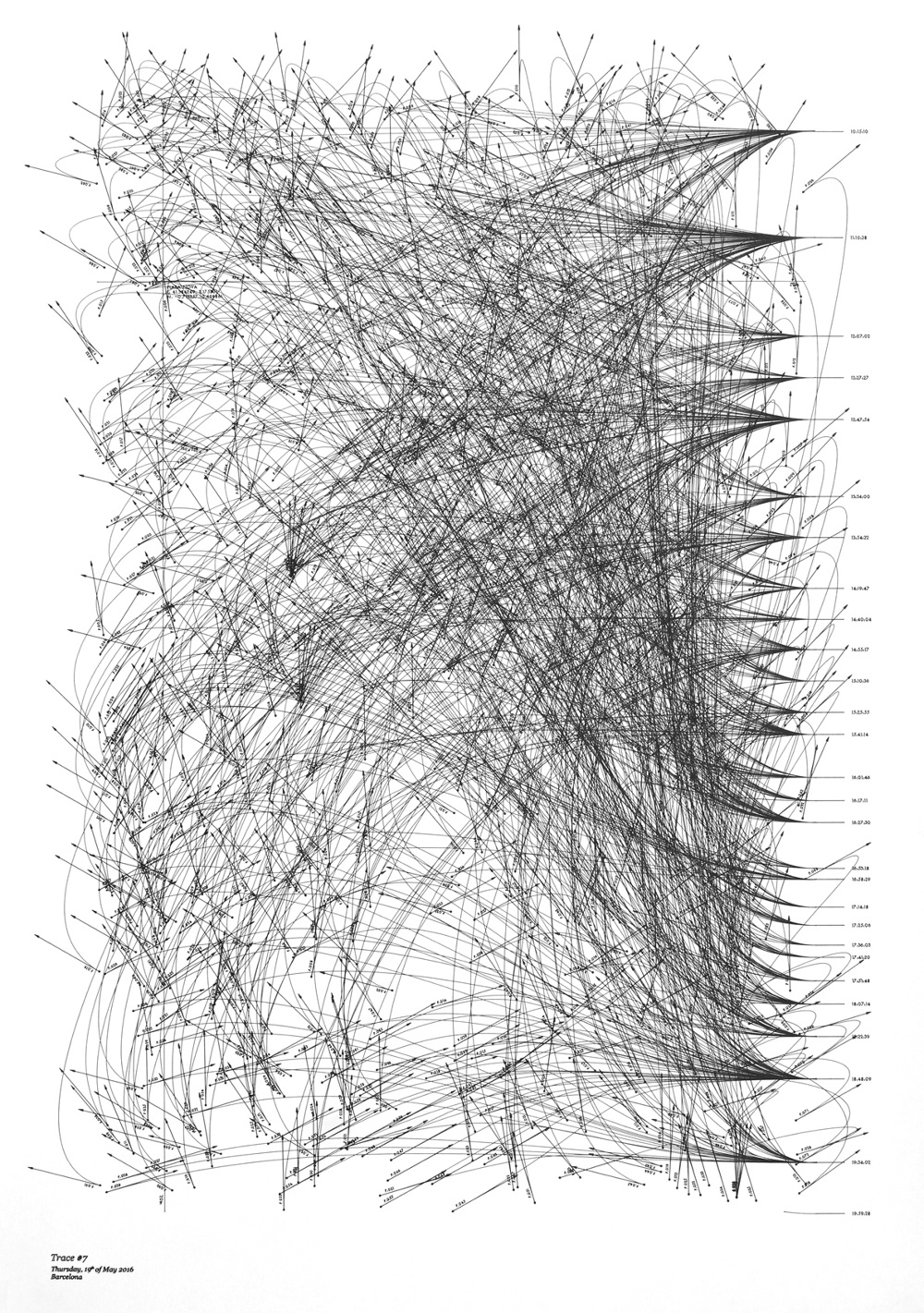
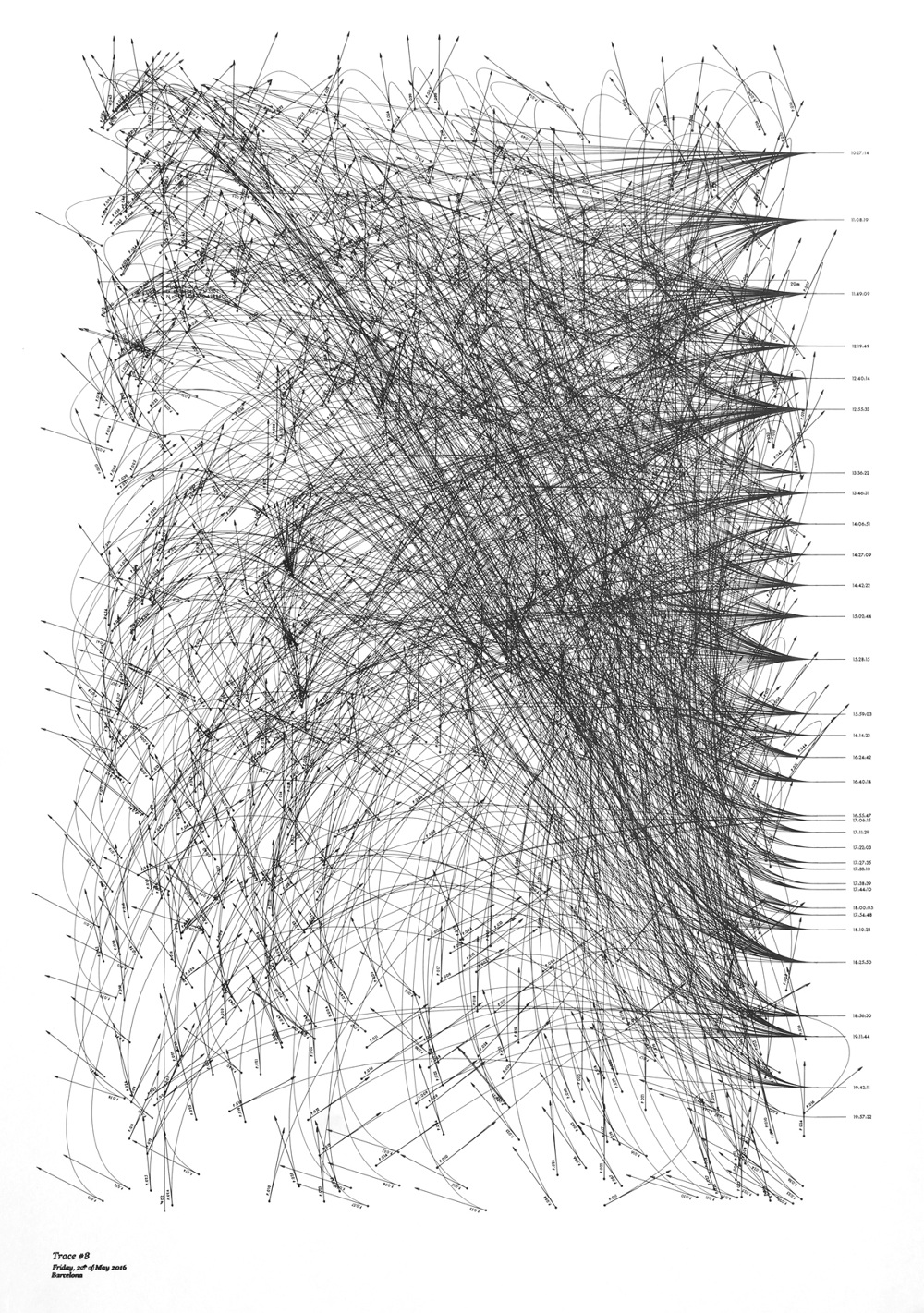
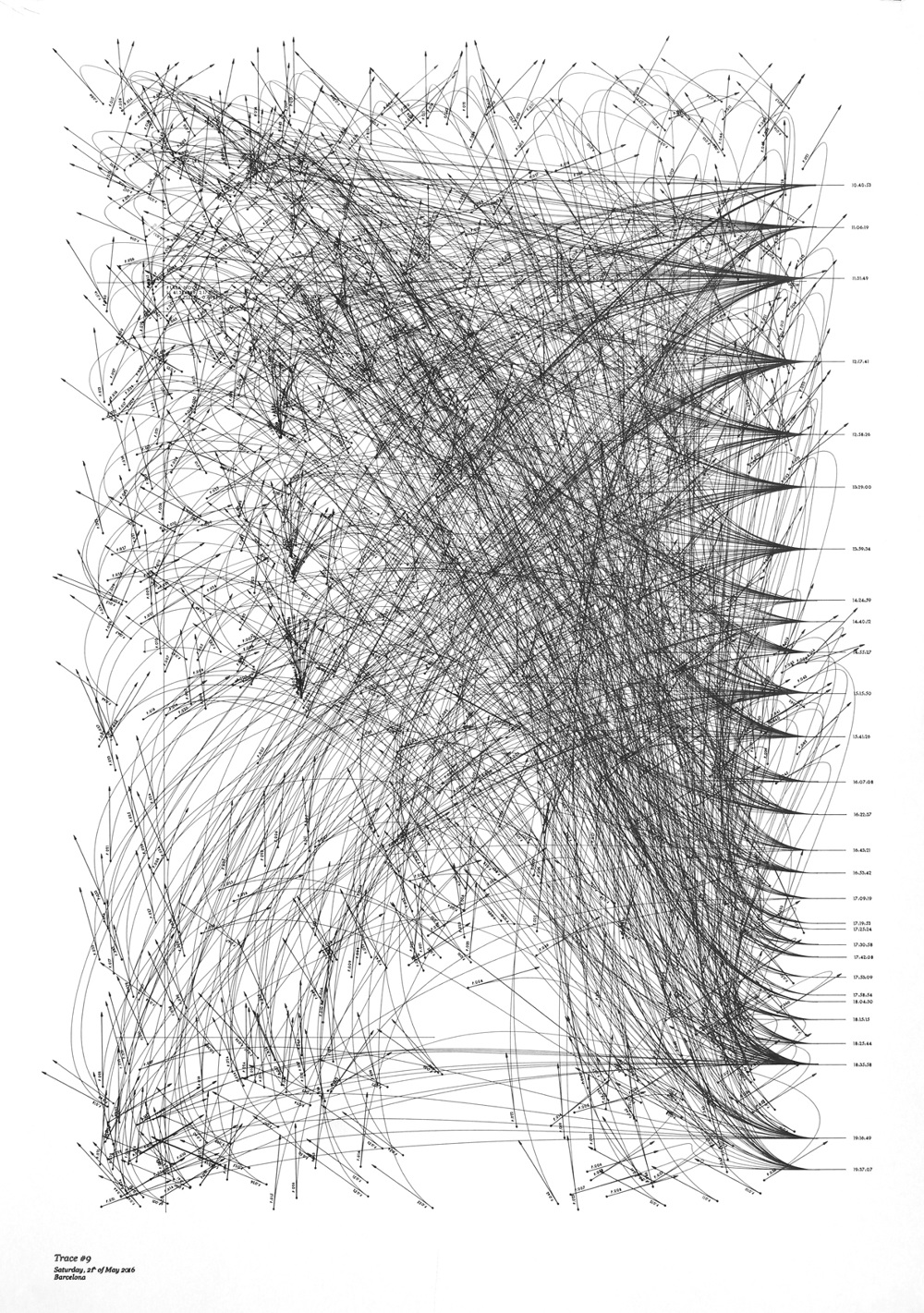
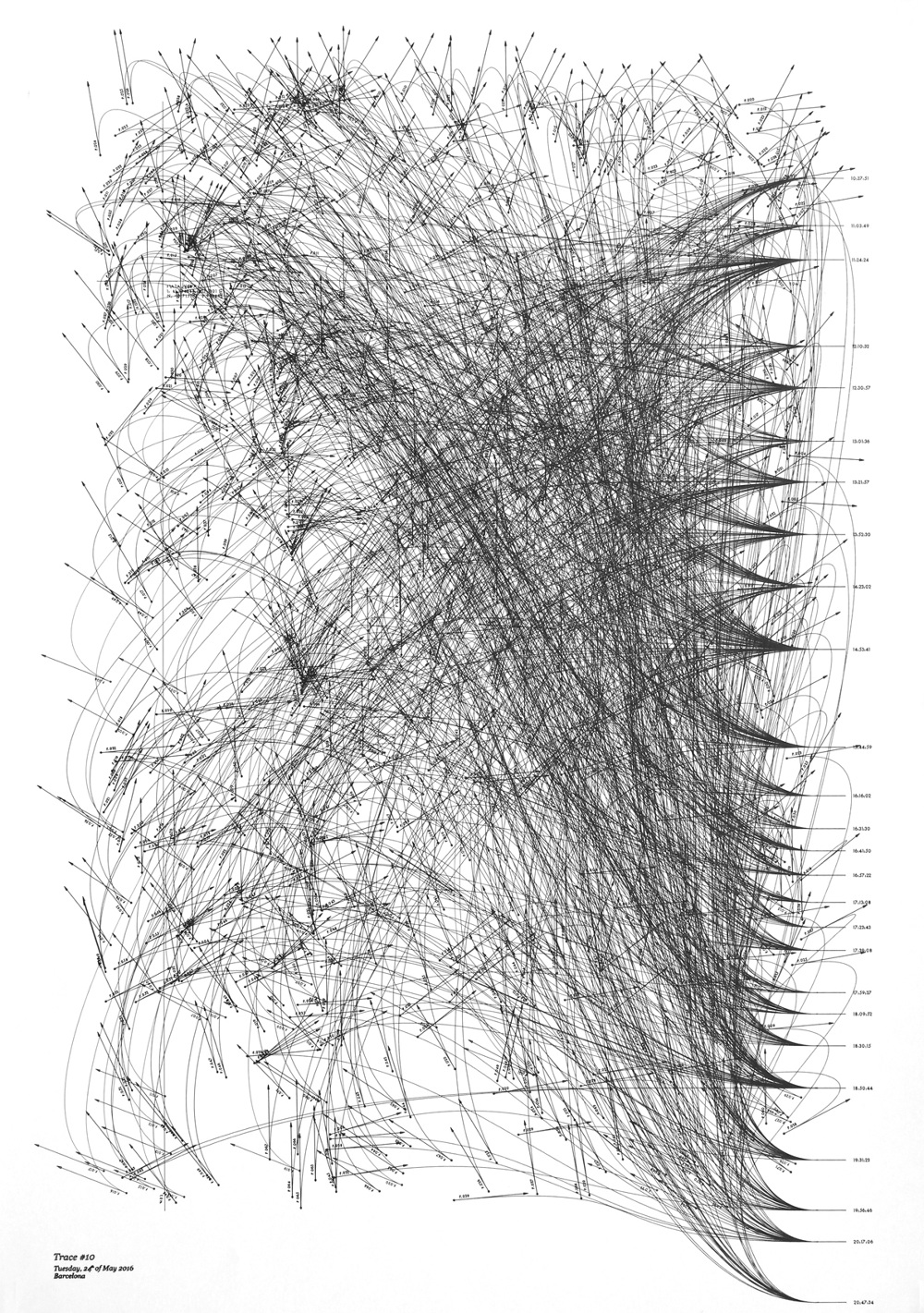
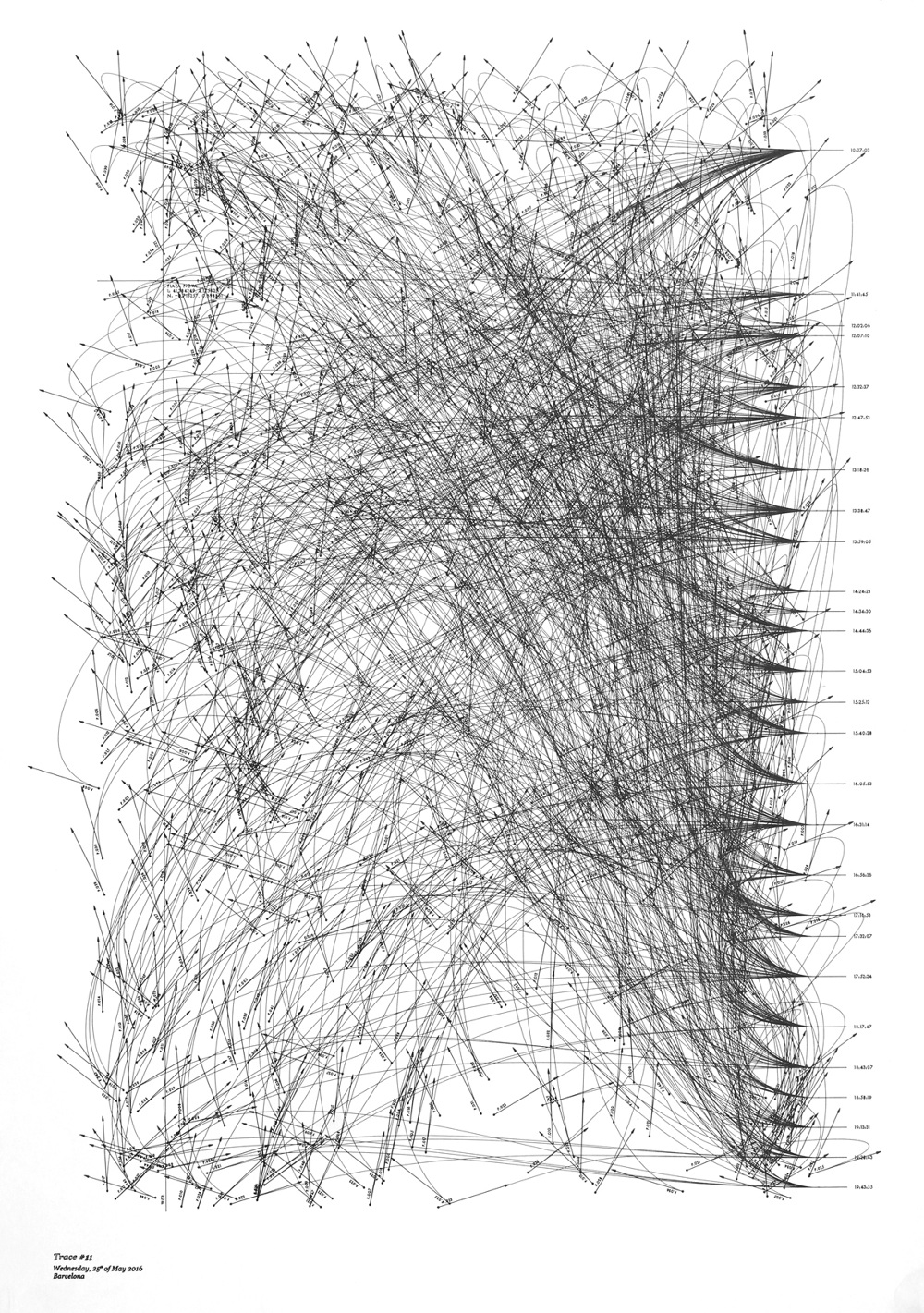
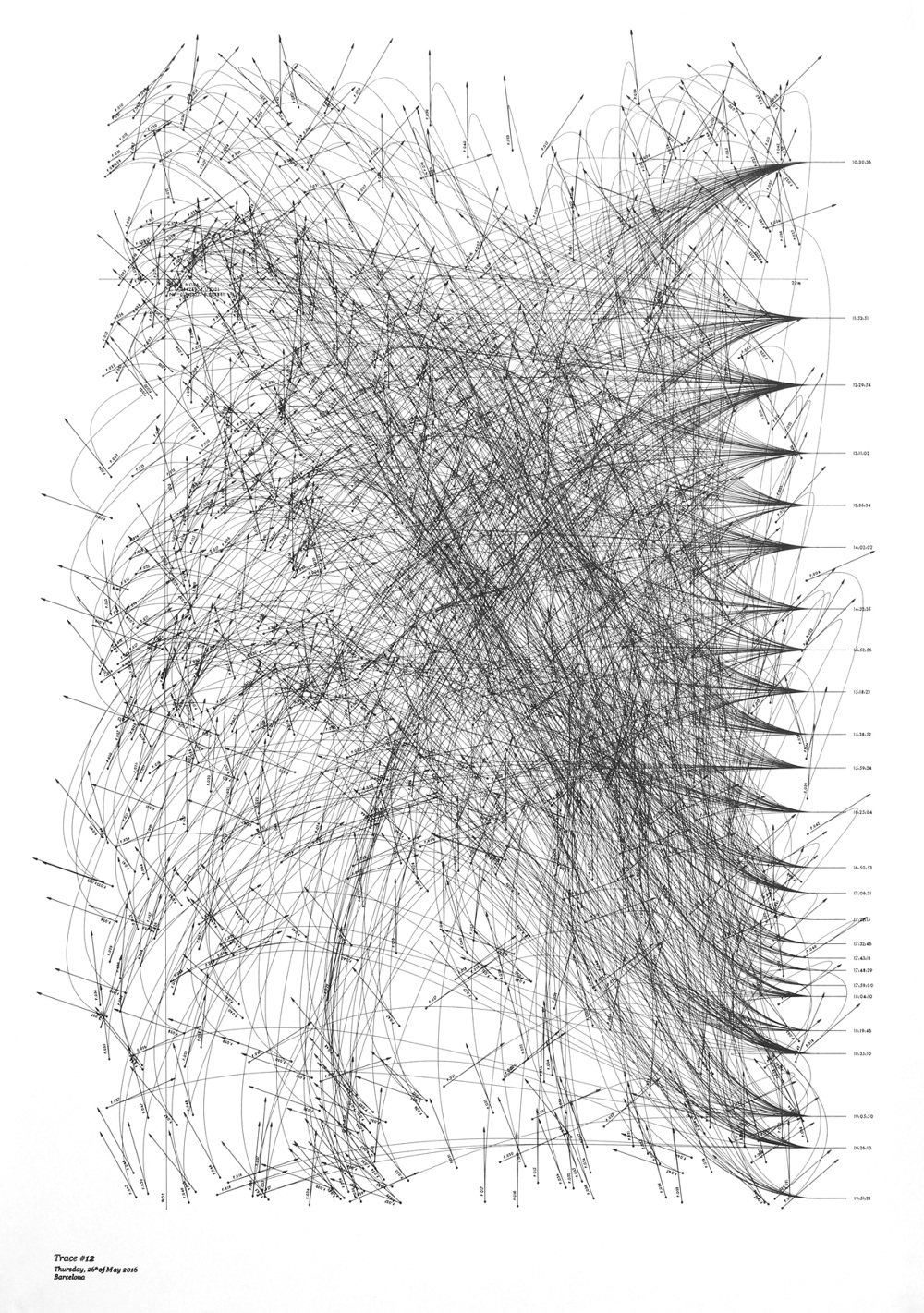
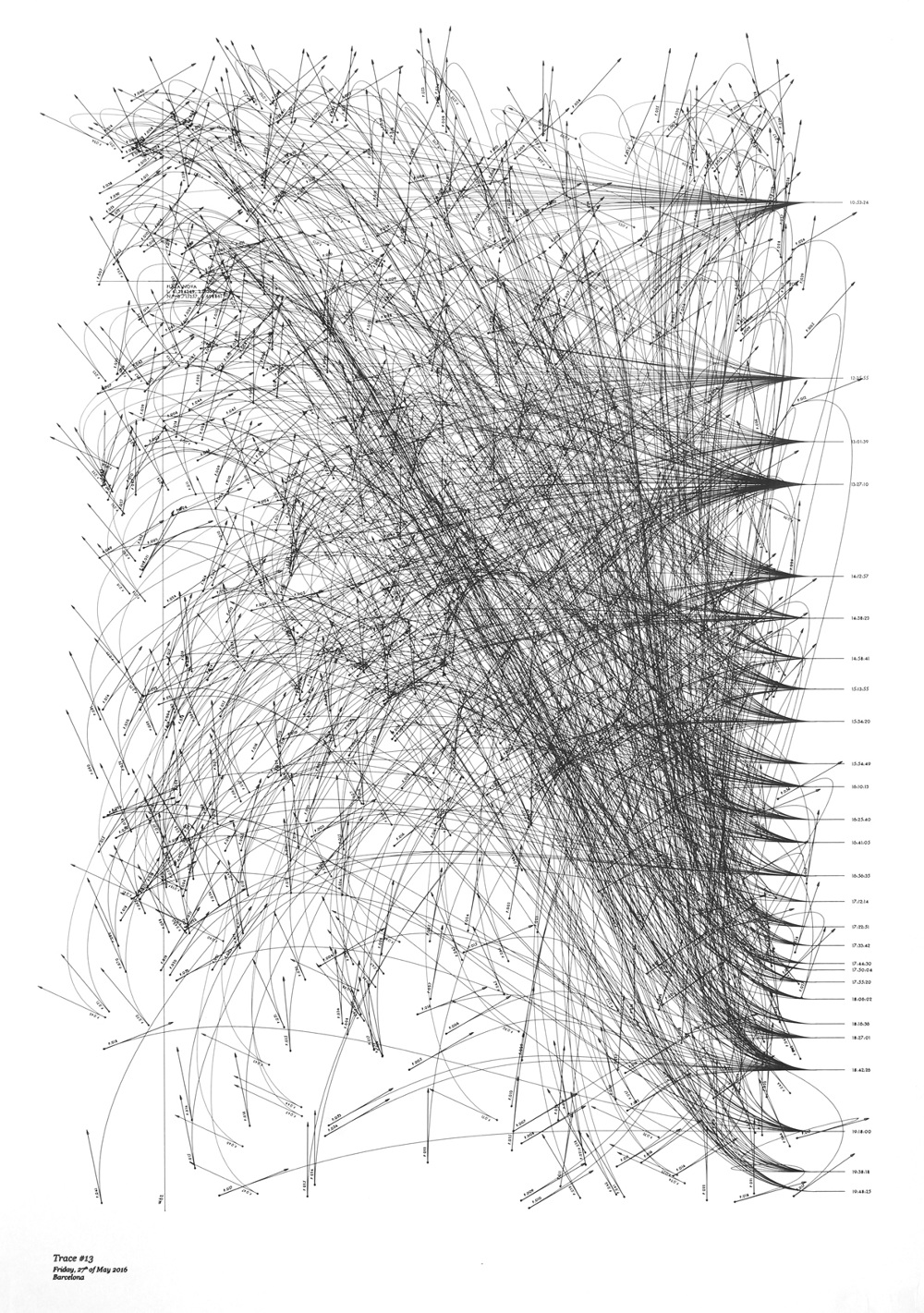
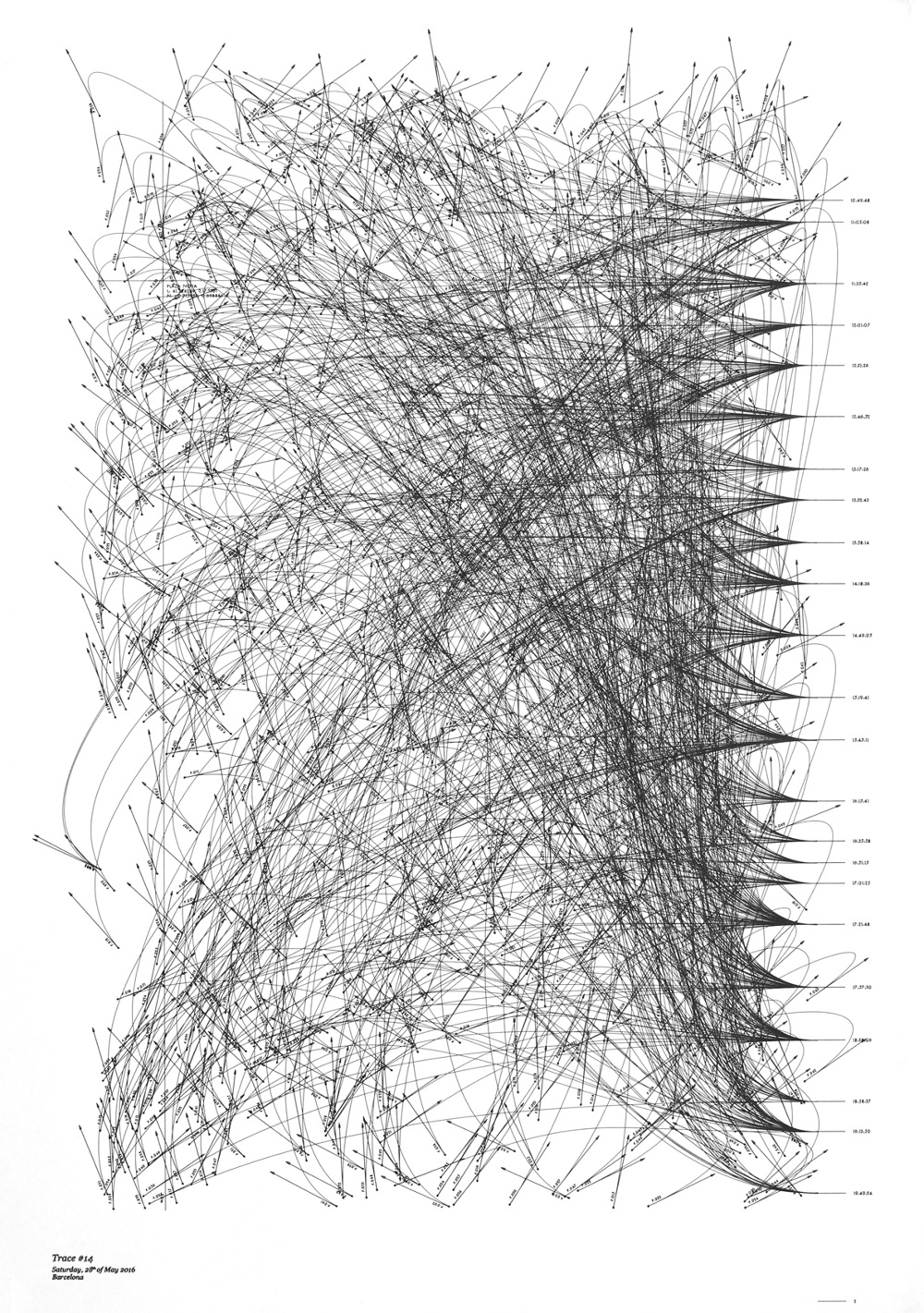
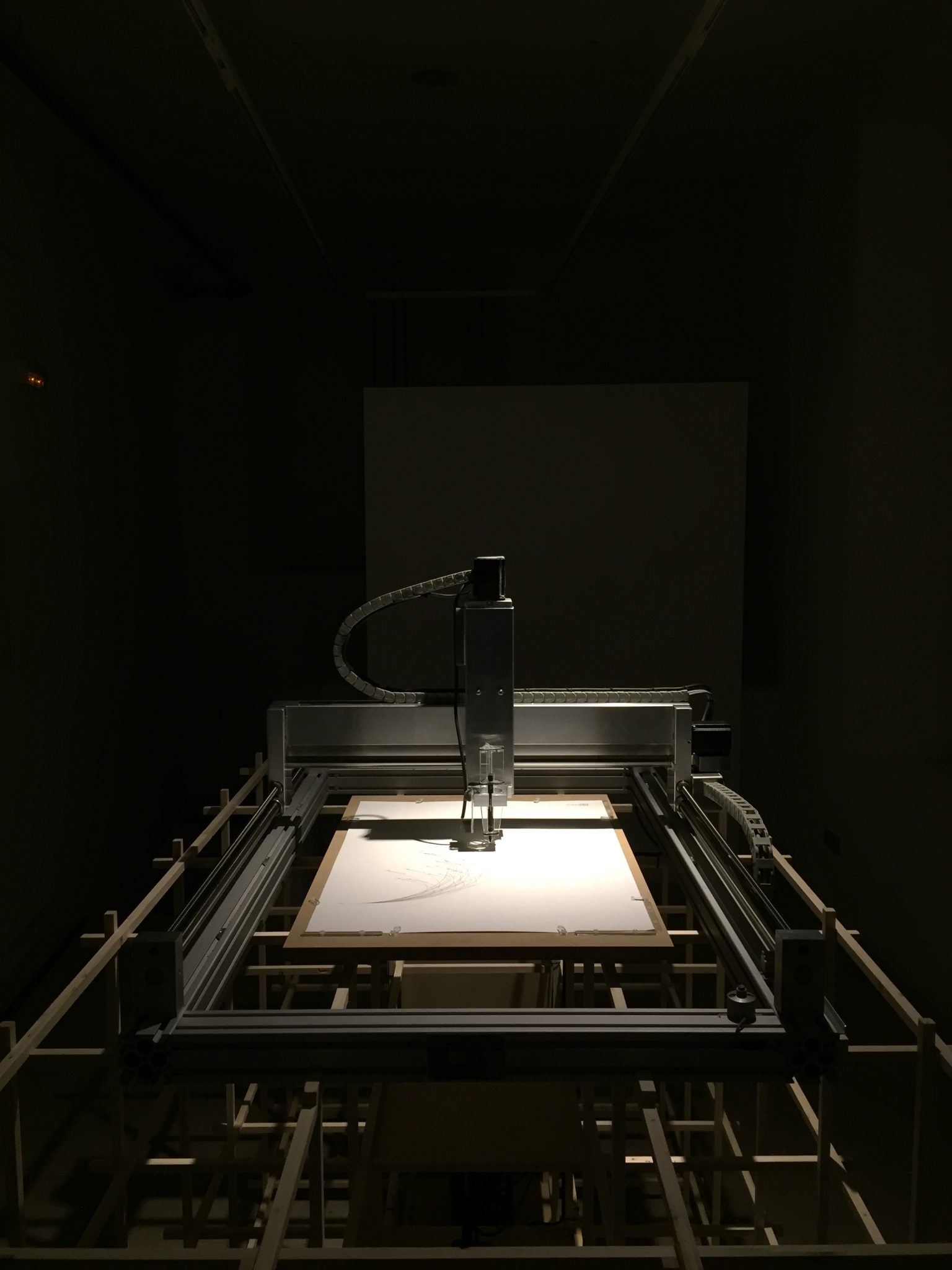
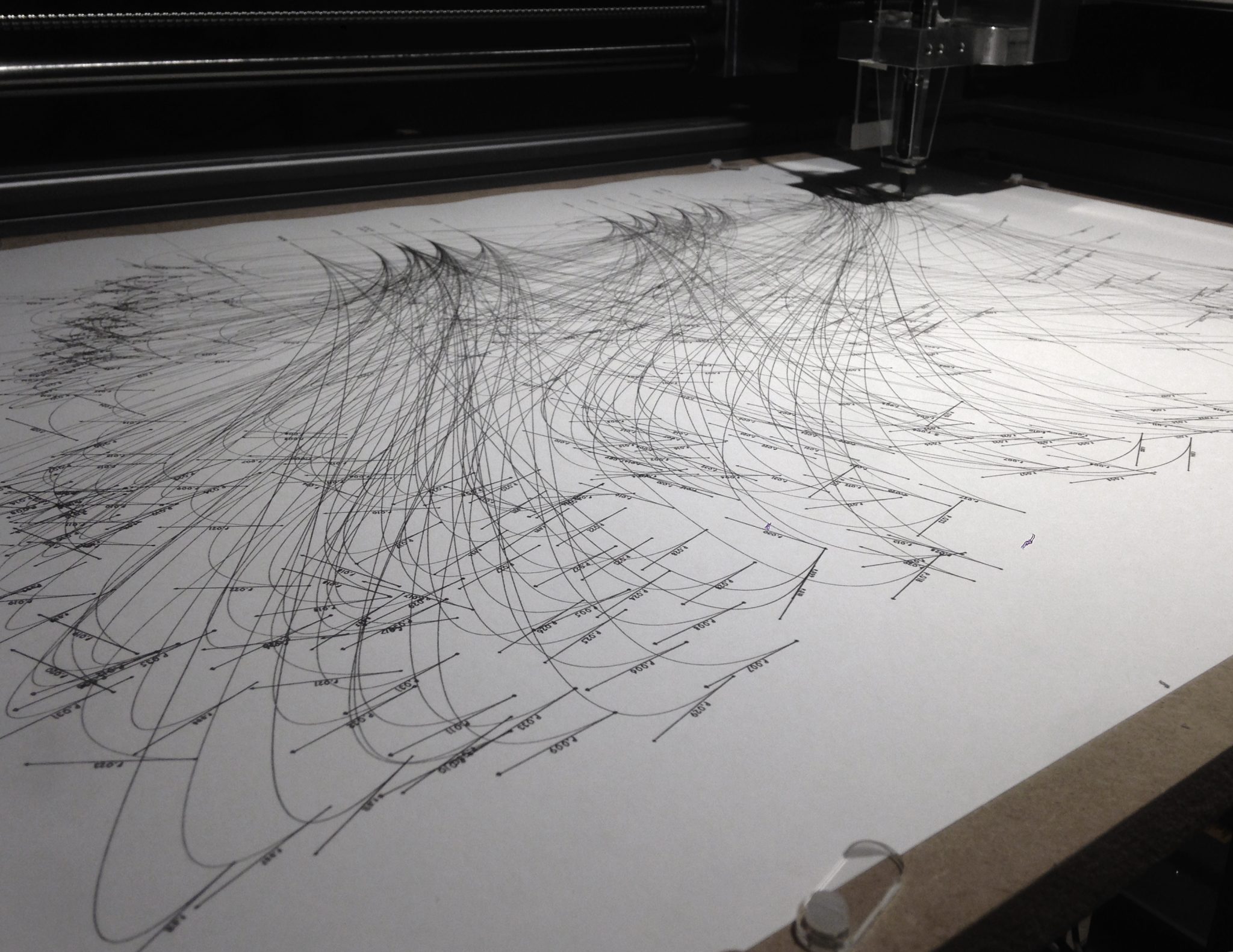
From 10 am to 8 pm each day, a camera mounted above Barcelona’s cathedral plaza captures an aerial photograph every minute. Each image is processed by a custom algorithm that maps the exact position of every individual in the square. This spatial data is then transmitted to a 3-axis robotic arm equipped with a pen, which draws each snapshot on a 50 × 70 cm paper canvas.
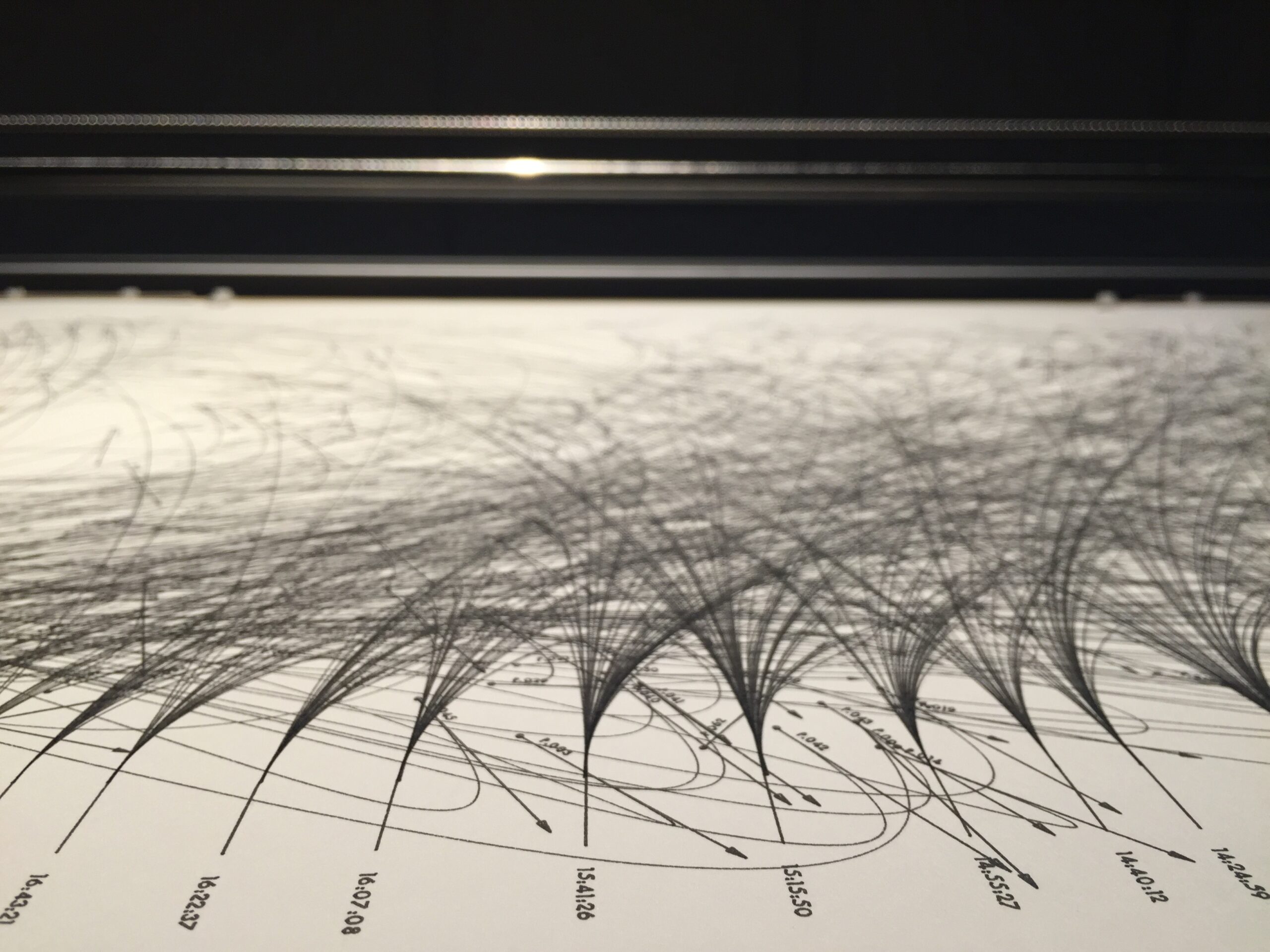
Each person is represented by a simple dot, numbered and oriented with a short line indicating the direction of the sun at that moment. Once a drawing is completed, the system retrieves the latest photo and begins again. The process repeats autonomously, layering hundreds of positional drawings on a single sheet throughout the day.
These dense compositions accumulate into visual records that reveal the latent choreography of public space: zones of activity and void, transient gatherings, and patterns of circulation. When observed over time, these algorithmic cartographies offer comparative insights into daily rhythms and the evolving social fabric of urban life.
Occasionally, the system malfunctions—scripts fail, commands misfire—and the resulting drawing departs from protocol. These moments of error introduce a visual unpredictability that challenges the strict logic of the machine, revealing the poetics of computational improvisation.

Computational Development
At the core of the system lies a fully autonomous computational workflow. A custom script continuously detects and vectorizes human positions from each new photograph, assigning orientation data and converting the output into generative instructions.
This data is transformed into a custom G-code sequence that integrates seamlessly into a CNC-driven control pipeline. Once processed, the robotic arm executes the drawing without pause or human intervention—completing the cycle and immediately beginning again. This closed-loop system sustains itself indefinitely, operating as an ongoing, self-regulating act of machine-driven cartography.
The full drawing logic was developed specifically for this installation: from detecting individuals and time-stamping their locations, to encoding solar orientation, to the automated generation and dispatch of G-code. This framework enabled the robotic system to function as a live performer—one that sees, interprets, and inscribes human presence in real time.